Things You Will Need to Scan Your Room
What Is LiDAR?
The system measures the time the beam takes to return.
In general, it is a distance meter.

It has a 360-degree scan field, a 5.5hz/10hz rotating frequency, and a ranger distance of 8 meters.
The system measures distance data at more than 2000 times per second and with high resolution distance output.
Consequently, it requires the use of several tools to process and visualize the data.

Why ROS?
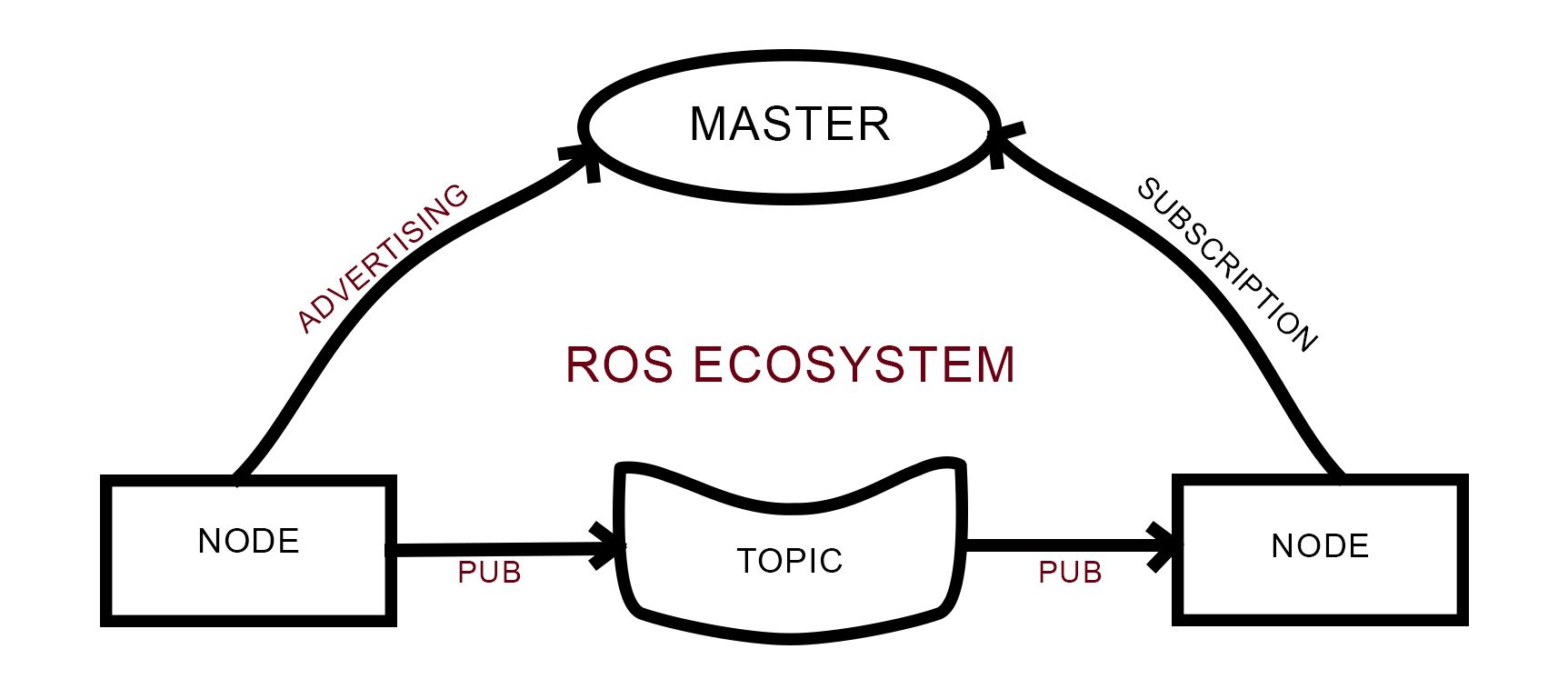
It was initially developed by Eric Berger and Keenan Wyrobek at Stanford University.
Those nodes are connected via topics over which they send and receive messages.

The hector_slam package will be used later for map creation.
The following step is to install ROS.
you could test ROS by running theroscore, which will serve as proof of proper installation.
Once you’ve completed your software, connect your LiDAR to your PC via the USB port.
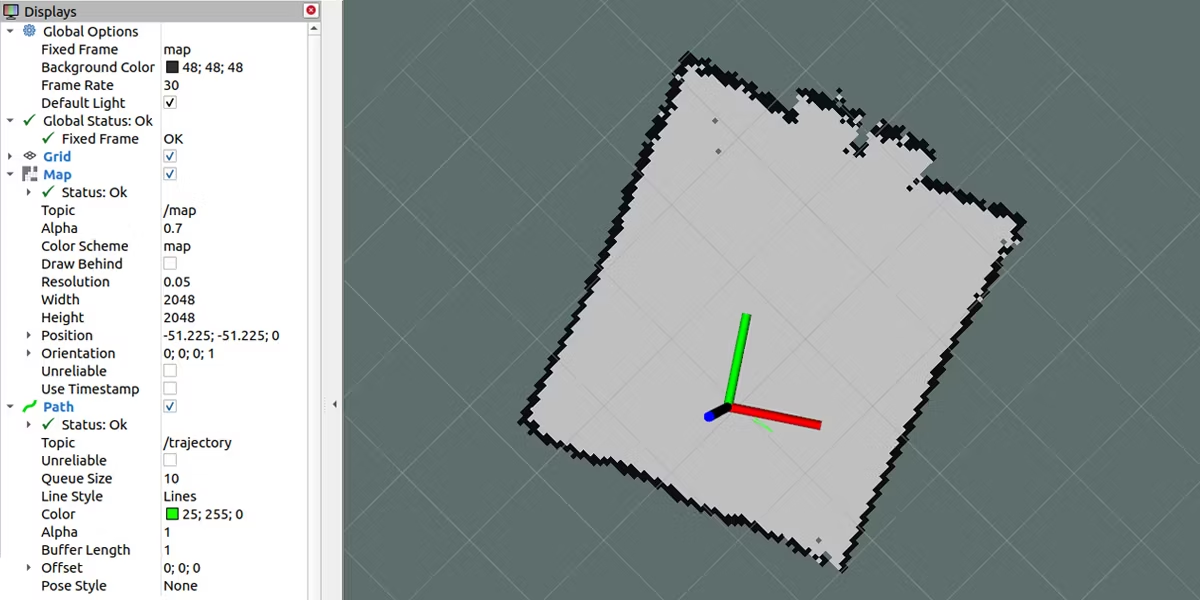
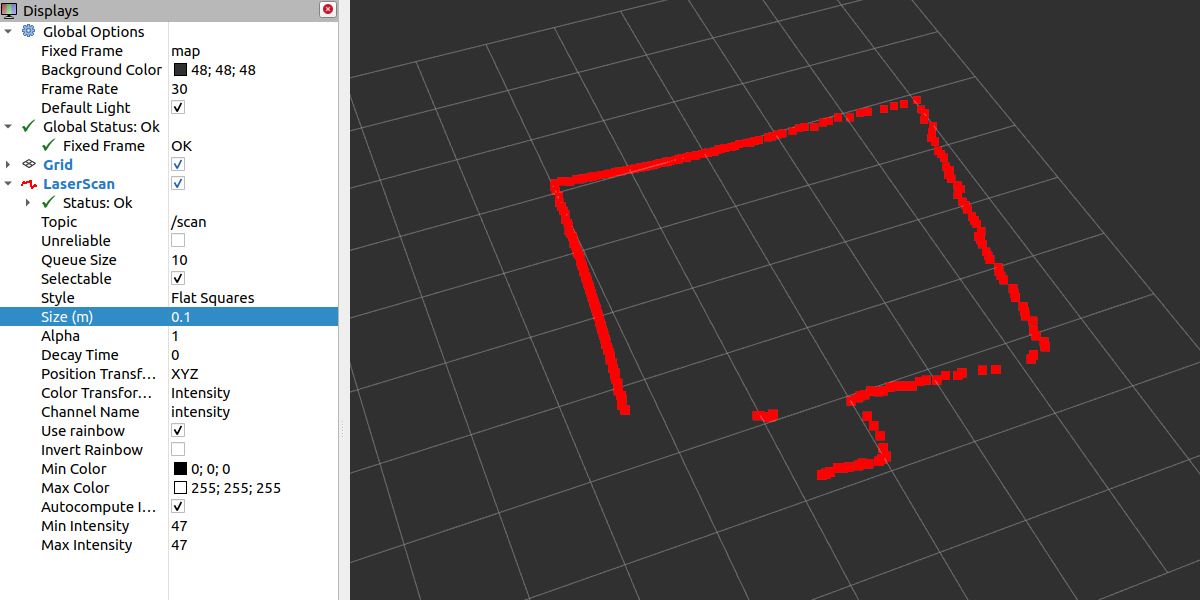
Change theFixed FrametoLaser, then click theaddbutton in the bottom-left corner of the window and selectLaserScan.
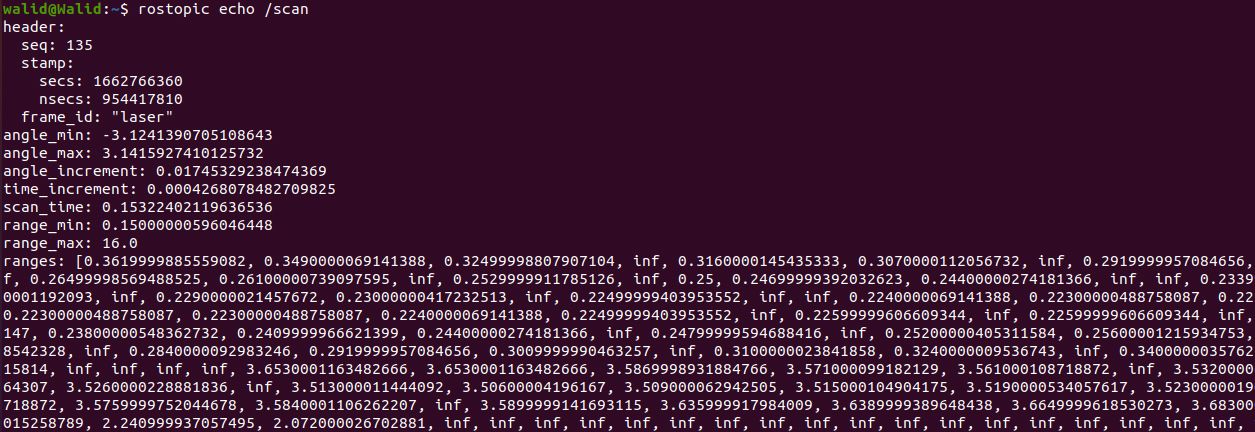
Finally, set the LaserScan topic to/scan, and you’ll be able to see your real-time LiDAR scan.
To fix this, trigger the following command and then continue with the previous steps.
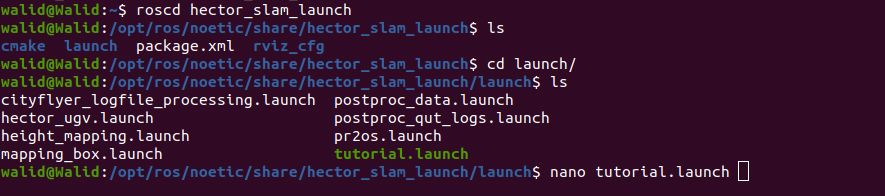
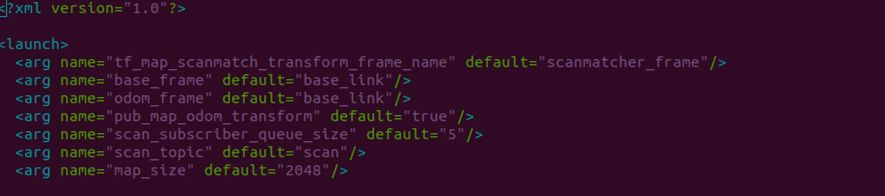
Search for tutorial.launch in the hector_slam package by using theroscdcommand.
The commandnanowill let you open your file and edit it.
you could turn on your trajectory and experiment with the laser scan prefs.
Outcomes can be improved by integrating additional sensors, and then combining the data from both sources.